联系我们
联系我们

1、SRVO—038 SVAL2 Pulse mismatch( Group: i Axis: j)脉冲编码器数据不匹配
2、SRVO—006 SRVO Hand broken 抓手断裂
3、SRVO—408 DCS SSO NTED输入
下面说明一下如何消除这些报警
1、SRVO—038 SVAL2 Pulse mismatch( Group: iAxis: j)
注:发生SRVO—038报警时,机器人完全不可以动。
步骤:
1).进入Master/Cal界面;依次按键操作: MENU - 0next - System - Type-Master/Cal
若步骤1 中无Master/Cal项,则按以下步骤操作:
a. 依次按键操作:MENU- 0 next - System - Type - Variables
b. 将变量$MASTER_ENB的值改为1;
c. 在MENU- 0 next - System – Type 中会出现Master/Cal项。
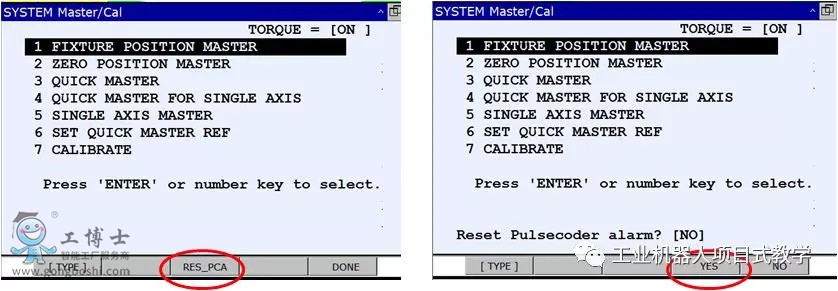
2). 在Master/Cal 界面内按F3 RES_PCA 后出现画面4 Reset pulse coder alarm?(重置脉冲编码器报警?);
3). 按YES 消除脉冲编码器报警;
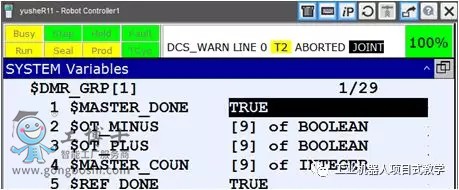
4).依次按键操作:MENU - 0 next - System - Type – Variables
5).找到变量$DMR_GRP[1].$MASTER_DONE,将其值改为TRUE
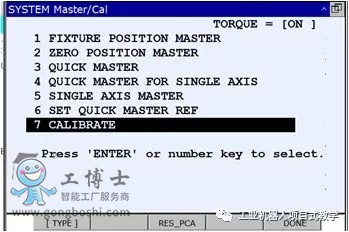
6)、按键操作:MENU - 0next - System - Type -Master/Cal,光标移至第7项,回车确认,重新匹配并更新零点数据
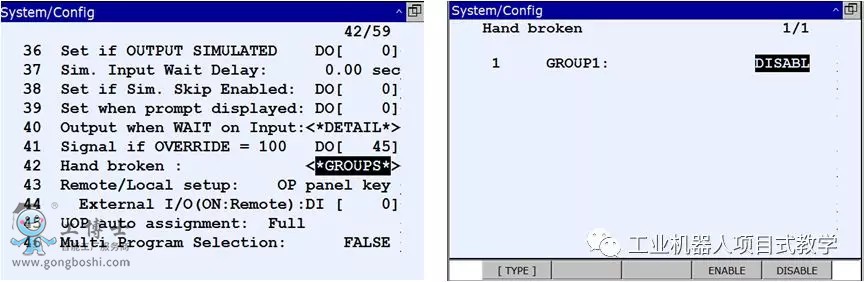
2、SRVO—006 SRVO Hand broken
按键MENU—NEXT PAGE—SYSTEM—CONFIG—Handbroken—<*GROUP*>—ENABLE改为DISABLE;
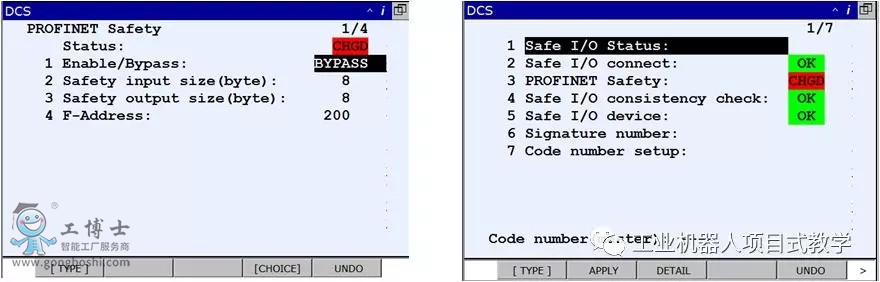
3、SRVO—408 DCS SSO NTED输入
按键MENU—NEXT PAGE—SYSTEM—DCS—PROFINET Safety(针对不同的工业总线,此处会有相应通讯方式的显示)—F3 DETAIL—第1项改为BYPASS;
按PREV键,返回上层界面,按F2APPLY ,在Code number(master)中输入1111;
在弹出的界面中,点击OK,等待几秒后会返回DCS主界面,之后重新启动机器人,完毕