

 联系我们
联系我们

此功能可以输出除了Warn级别以外的机器人所产生的报警内容。
相关手册
本软件是基于手册FANUC机器人 R- 30iB Controller Option Function Operator’sManual (B-83284EN-2)第20章Error Code Output功能的说明。
功能设定步骤
使用此功能涉及到二个系统变量。$ER_OUT_PUT.$OUT_NUM和$ER_OUT_PUT.$IN_NUM。
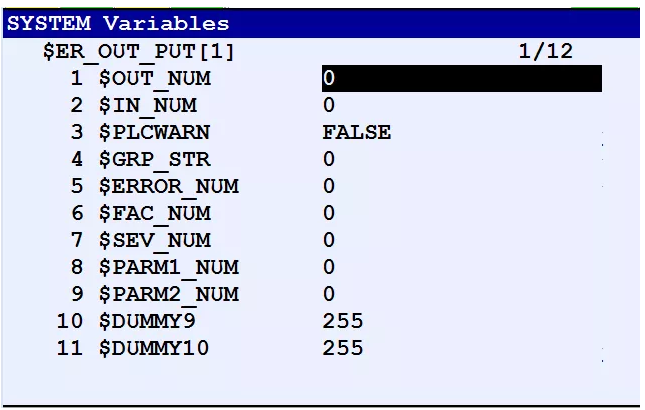
Error Code 变量
若$ER_OUT_PUT.$OUT_NUM设置为0,则Error Code Output Function关闭。若$ER_OUT_PUT.$OUT_NUM设置为1,则启用Error Code Output Function。DO配置33个点,这33个点的分配如下表所示。
DO分配情况
通常一个报警代码是由报警等级,报警的ID号和报警数字号构成。如SVRO 002,报警等级是SERVO,报警的ID是“SRVO”,报警数字是2。对应的DO信号情况分别为报警等级列表、报警ID列表和报警数字列表中红色框所示。
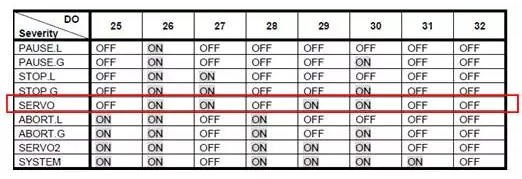
报警等级列表
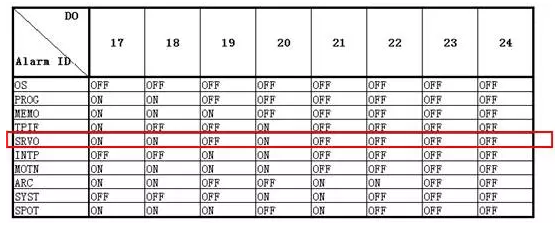
常用报警ID列表
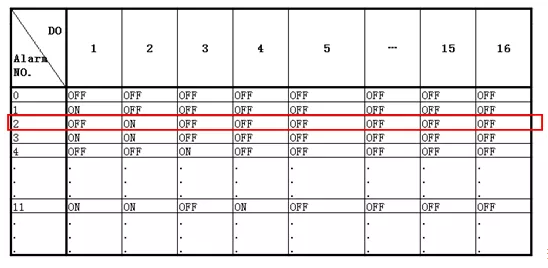
报警数字列表
$ER_OUT_PUT.$IN_NUM的设定值为确认哪个DI为Search signal,请求报警输出的更新。
监控时序步骤
通过Utilities 菜单进入Data Monitor Schedule 界面若报警仅有一个,监控时序如下:
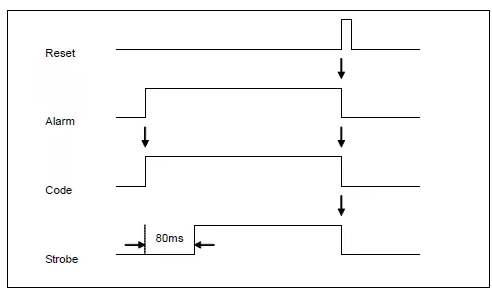
监控时序
若报警有多个(支持100个报警输出),监控时序如下: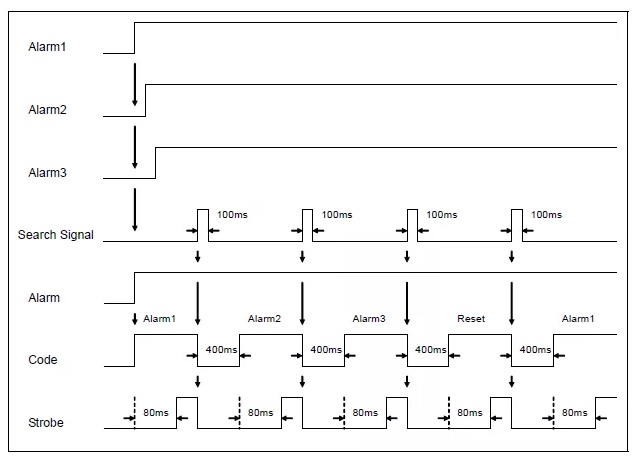
多报警监控时序
功能总结
该功能可以将机器人产生的报警以数字信号形式输出到外部设备。但WARN和NONE级别的报警不会被输出。(文章来源于:网络)
更多资讯:发那科机器人
