

 联系我们
联系我们

当零点返回机器人时,需要传递机器人的机械信息。与位置信息同步,以定义机器人的物理位置。

零点还原是从一个已知的机械参考点读取一个串行脉冲编码器信号的过程。

2故障情况
初始化开始
主板电池电压不足
关闭电源,取下电池外壳盖
SPC电源线断开
维修(SPC更换,电机拆装)
机身电池电压不足
零碰撞误差
3故障现象
设备SRAM数据清空
同时出现SRVO-062报警 & SRV哦O-075警告
出现SRv-038报警
4处理方式
情况一:设备SRAM数据清空
解除方法:将该设备本身的备份文件导入控制柜即可。
注意:如果导入 SYSMASTSV文件时,机器人姿态和进行备L份时的姿态不同,则会出现SRV-038报警。
情况二: SRVO_062报警 & SRVO_075警告
解除方法:
1)消除SRVO_062(解除前,机器人完全不能动作)
2)消除SRVO_075(机器人只能以关节巫标系点动)
3)选择合适的方法进行零点复归(零点复归完成之前,机器人只能以关节坐标系点动)
详细过程如下:SRVO_062 BZAL alarm (Group: i Arxis ;j )
 报警灯亮,机器人无法动作。
报警灯亮,机器人无法动作。 Menu— —System— —Master/Cal,选择 F3 RES_PCA— —F4 YES,然后关机重启。

SRVO-075 WARN Pulse not established (Group: i Axis: j)
脉冲编码器无法计数报警
机器人只能在关节坐标系下,单关节动作 机器人软限位被忽略。
方法:
1)示教坐标系切换为 Joint .,将所有的报警轴点动20°以上
2)按 Reset复位。
报警轴查看:
Menu--AIarm--F3 Hist,进入报警历史界面进行查看。
零点复归
( 以下方式选择)
1)零位大师
优点:该方法可在任何情况下恢复零损失
缺点:需要同时调整6个轴,累积误差较大
2)单轴主机
特点:只能调整报错轴,适当累积误差值
能够直接输入选中的角度值,可以使用自定义标记位置
3)快速掌握
要求:快速大师必须在零点丢失之前做出
特点:只能用于电气和软件故障造成的零损耗
它可以补偿一段时间内的错误
方法一: 零度点调整( ZERO POSITION MASTER)
1)将机器人手动示教(JOINT坐标系)到各轴刻度线对齐的位置

2) MENU— —SYSTEM— —MASTER/CAL
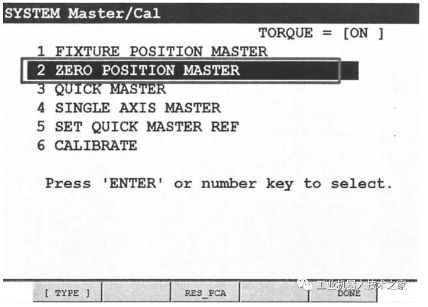
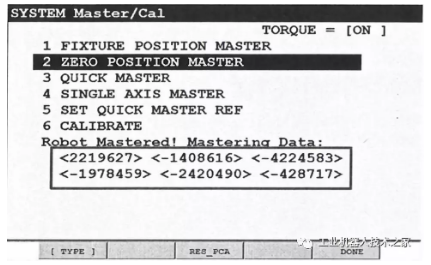
3)在MASTER/CAL界面中,选择“ZERO POSITION MASTER”
4) 在MASTER/CAL界面中,选择“CALIBRATE”

方法二: 单轴核对方式 (SINGLE AXIS MASTER)
1)MENU---SYSTEM---MASTER/CAL
2)在 MASTER/CAL界面中,选择“ SINGLE AXIS MASTER”进入
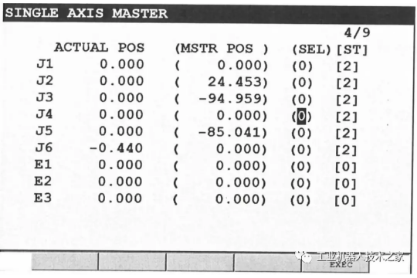
3) 核对机器人本体刻度
4)将SEL改为“1”、将MSTR POS的值改为刻度位置的值,按F5 EXEC
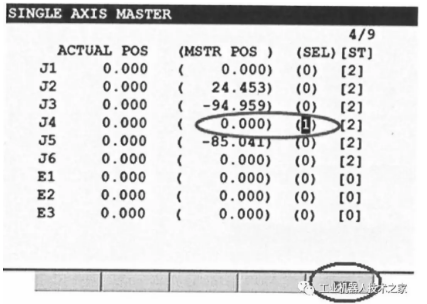
5)PREV返回MASTER/CAL界面,选择CALIBRATE
情况三:SRVO-038报警
解除方法
1) 解除SRVO-038(报警解除前,机器人无法动作)
2) 修改参数,并校准(即恢复机器人的零点)
详细过程如下:SRVO_038 SVALZ Pulse mismatch (Group: i Arxis ;j)脉冲编码器数据不匹配
报警灯亮,机器人无法动作。 1)解除SRVO_038
Menu— —SYSTEM— —Master/Cal,选择 F3 RES_PCA— —F4 YES,然后RESET.

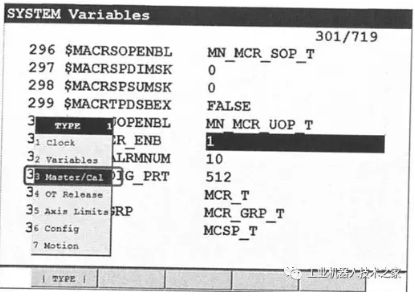
2)修改参数
Menu— —SYSTEM— —Variable,找到SDMR—点击ENTER键,找到SMASTER—DONE,将其改为TRUE。

选择F1 TYPE— —MASTER/CAL,选择CALIBRATE。
5注意事项
在Menu— —SYSTEM中未发现MASTER/CAL选项
处理方式:
A.直接选择VARIABLES
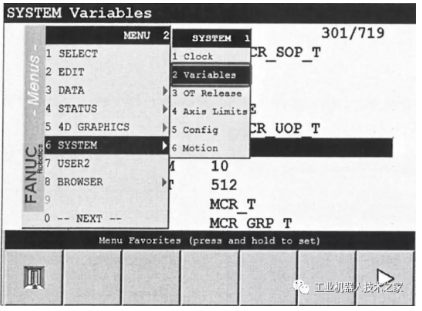
B.找到变量SMSTER_ENB选项将其值改为“1”

C.直接选择 F1 TYPE,可以看见MASTER/CAL选项。
来源:网络
更多资讯:发那科机器人
